Gary Mortimer
November 24, 2016
Now imagine the delivery drone you are expecting is only coming from a vehicle near to your home. Perhaps one that has parked itself in a strategic spot to allow the speediest deliveries for the lowest mileage in a suburb. It’s not flying all the way from a hub.
Once it’s completed its last flight in the area the truck can start moving to its next parking spot and the drone can find itself to it en route and land back without the truck having to stop.
Or better still instead of flying home the drone can jump onto a bus and hitch a lift until its close enough to hop over the fence in time for tea and medals.
Just these sort of scenarios have been imaged in a paper by a team from the Mobile Robotics and Autonomous Systems Laboratory at Polytechnique Montreal.
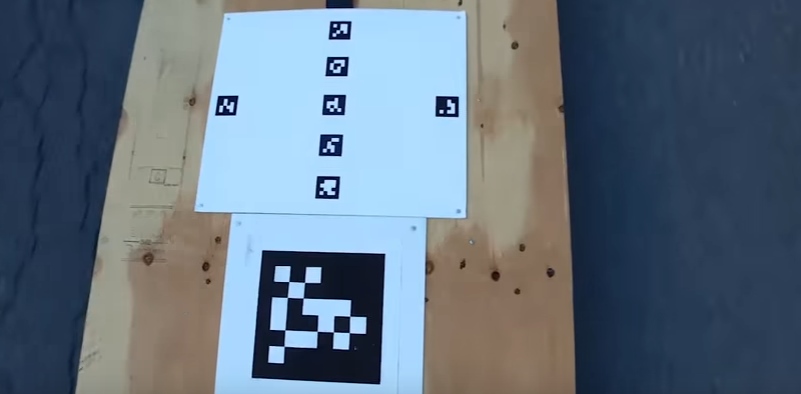
While autonomous multirotor micro aerial vehicles (MAVs) are uniquely well suited for certain types of missions benefiting from stationary flight capabilities, their more widespread usage still faces many hurdles, due in particular to their limited range and the difficulty of fully automating their deployment and retrieval. In this paper, we address these issues by solving the problem of the automated landing of a quadcopter on a ground vehicle moving at relatively high speed. We present our system architecture, including the structure of our Kalman filter for the estimation of the relative position and velocity between the quadcopter and the landing pad, as well as our controller design for the full rendezvous and landingmanoeuvres. The system is experimentally validated by successfully landing in multiple trials a commercial quadcopter on the roof of a car moving at speeds of up to 50 km/h.
Read more at:
No comments:
Post a Comment