suasnews.com
By Press
12 December 2016
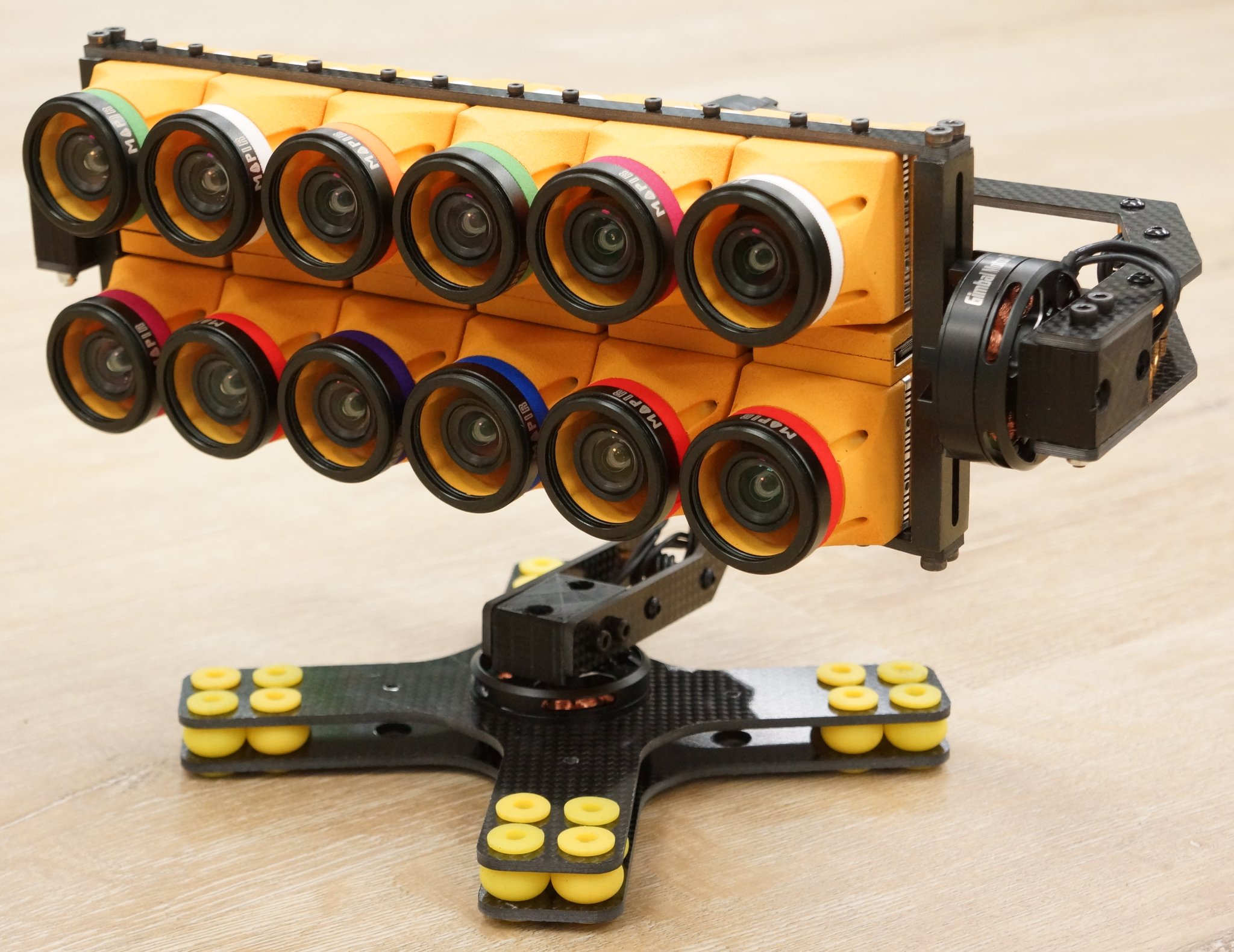
The Kernel camera is the first modular camera platform that can be easily connected together to form custom, compact camera arrays. No longer are you locked into a particular sensor, lens, or filter setup: with Kernal you can swap anything out in the field. With an open hardware and software design, you can create new accessories and code to adapt Kernel to meet your project’s needs. Ideal for vehicle (e.g., aerial drone) manufacturers, integrators, and operators looking to build powerful, custom, multi-spectral, and varying field of view camera arrays.
Features & Specifications
System on Chip (SoC): Freescale i.MX 6 Dual ARM Cortex A9 1.2GHz
Operating System (OS): Yocto Linux
Sensors: 1.2 MP mono/RGB (global), 3.0 MP mono/RGB (global), 14 MP RGB (rolling)
Lenses: 41° 47mm, 47° 43mm HFOV (35mm equivalents, based on sensor selection)
Filters: RGB, NDVI (Red+NIR), 850 nm, 808 nm, 720 nm, 650 nm, 548 nm, 450 nm, etc.
Interfaces: Serial/UART, UAVCAN, PWM, USB, I2C, Ethernet, GPIO, HDMI & SD Video
Positional Sensor: Inertial Measurement Unit (IMU) – 3xAccel., 3xAng., 3xMag. (ST Micro LSM9DS1TR )
Trigger: PWM (camera and direct sensor), internal intervalometer, GPS distance
Expansion Ports: Side 40-pin “Kernel Port”,
Storage: Removable microSDXC (max 128 GB)
Power (Kernel): 5.0 VDC, 4.2 W (max)
Power (Array): 11.1 – 22.2 VDC (3S-6S), 8.4-50.4 W (max, 2-12 Kernels)
Dimensions (Kernel): 34 mm x 34 mm x 56 mm (length x width x height)
Weight (Kernel): 60g
We listened to you and built the camera you wanted:
Swappable Lenses: easily change the camera’s field of view
Swappable Filters: easily change spectral bands for vegetative and other analysis
Swappable Mounts: options for mounting to many drones
Native Geo-referencing: no need to extract the drone’s log file
Global Shutter: no more image jello
Batteries Not Required: tap into the drone’s power to reduce payload weight
Simultaneous Triggers: trigger multiple cameras with no delay between sensors
Replacement Parts: don’t throw the whole thing away because you broke one part
Fast Image Capture: fly your drone faster and cover more area
Upgradeable: no need to buy an entirely new system
If your vehicle is recording sensor data, so will Kernel.
Kernel is the first camera to support UAVCAN: “a lightweight protocol designed for reliable communication in aerospace and robotic applications via CAN bus.” The CAN bus connects the flight controller or companion computer’s sensor readings with Kernel. Common values today include GPS location, GPS time, airspeed, compass, gyroscope, accelerometer and level horizon. All sensor data the user chooses to save will be hard-coded to each captured image’s metadata (EXIF) to assist with image post-processing. The UAVCAN port is located on the side of Kernel and adheres to the UAVCAN and Dronecode standards.
The embedded metadata on the images follows the standards of the most popular post-processing point-cloud programs such as Pix4Dmapper and Agisoft Photoscan. In the case that some information is different between programs there will be templates you can select in the interface application to ensure that media import runs smoothly, and all relevant data is able to be read properly by the application. The interface application will also be used to tell the camera what lens and filter is being used so that it can adjust the metadata accordingly.
This metadata creation is also supported via Kernel’s serial/UART connection, commonly utilising the Mavlinkprotocol. With Mavlink installed on Kernel, you can connect directly to each camera with applications such as QGroundControl.
Read more at:
No comments:
Post a Comment